Valvekoera kellahaldus Arduinos
Elektroonikas ja laiemalt ka andmetöötluses on valvekoer ressurss, mis võimaldab füüsilisel seadmel või rakendusel taaskäivitada, kui see enam normaalselt ei tööta. Täpsemalt, viidates mikrokontrolleritele, on see pöördloenduskell, mis ületäitumisel lähtestab.
Loogiliselt võttes ei tea seade, millal ta enam korralikult töötamast lakkab, tööpõhimõte on vältida pöördloenduse lõppemist ja seega ka süsteemi lähtestamist. Selleks konfigureeritakse esmalt taaskäivitamise ajavahemik ja teiseks värskendatakse seda väärtust, mis näitab, et seade töötab korralikult ja seda ei tohiks hetkel taaskäivitada.
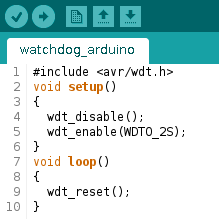
Valvekoera juhtimiseks koos Arduino raamatukogu tuleks kasutada ja ainult kolm funktsiooni: selle keelamiseks lähtestamisaja konfigureerimise ajal, mis konfigureerib ja aktiveerib valvekoera parameetrina näidatud ajal (aeg) ja mis uuendab intervalli, mida valvekoer loeb.
|
1
2
3
4
5
6
7
8
9
10
11
12
|
#include <avr/wdt.h> // Incluir la librería que contiene el watchdog (wdt.h)
void setup()
{
wdt_disable(); // Desactivar el watchdog mientras se configura
wdt_enable(WDTO_2S); // Configurar a dos segundos
}
void loop()
{
wdt_reset(); // Actualizar el watchdog para que no produzca un reinicio
}
|
Konstandid, mida saab kasutada loendusaja määramiseks on järgmised:
- = 15 millisekundit
- = 30 millisekundit
- = 60 millisekundit
- = 120 millisekundit
- = 250 millisekundit
- = 500 millisekundit
- = 1 sekund
- = 2 sekundit
- = 4 sekundit
- = 8 sekundit
Enne valvekoera kasutamist on oluline tagada, et alglaadur Mis on plaadi mikrokontrolleril? Arduino on ette näinud selle ressursi kasutamise. Plaatides on teadaolev viga Arduino Mega 2560 mis jäid rippuma just nende programmidega, mis kasutasid valvekoera.
Lisateavet selle kohta, mida a alglaadur või alglaadimishaldur ja kuidas salvestada teistsugust kui teie taldrikuga kaasas olev, saate tutvuda artikkel Atmeli mikrokontrollerite programmeerimismeetodite kohta.



Postita kommentaar