Watchdog-kellonhallinta Arduinossa
Elektroniikassa ja laajemmin laskennassa vahtikoira on resurssi, jonka avulla fyysinen laite tai sovellus voi käynnistyä uudelleen, kun se lakkaa toimimasta normaalisti. Tarkemmin sanottuna mikrokontrollereihin viitaten se on lähtölaskentakello, joka tuottaa nollauksen, kun se ylivuodon.
Loogisesti laite ei tiedä milloin se lakkaa toimimasta oikein, toimintaperiaate on estää lähtölaskennan päättyminen ja siten järjestelmän nollaus. Tätä varten ensin määritetään aikaväli, jolloin uudelleenkäynnistys tapahtuu, ja toiseksi tämä arvo päivitetään, mikä osoittaa, että laite toimii oikein eikä sitä pitäisi käynnistää uudelleen tällä hetkellä.
Voit hallita vahtikoiraa Työläs kirjastoa kannattaa käyttää ja vain kolme toimintoa: poistaaksesi sen käytöstä määrittäessäsi nollausaikaa, joka konfiguroi ja aktivoi vahtikoiran parametrina ilmoitettuna aikana (aika) ja joka uusii vahtikoiran laskeman intervallin.
|
1
2
3
4
5
6
7
8
9
10
11
12
|
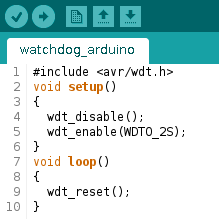
#include <avr/wdt.h> // Incluir la librería que contiene el watchdog (wdt.h)
void setup()
{
wdt_disable(); // Desactivar el watchdog mientras se configura
wdt_enable(WDTO_2S); // Configurar a dos segundos
}
void loop()
{
wdt_reset(); // Actualizar el watchdog para que no produzca un reinicio
}
|
Vakiot, joita voidaan käyttää asettaaksesi lähtölaskentaajan:
- = 15 millisekuntia
- = 30 millisekuntia
- = 60 millisekuntia
- = 120 millisekuntia
- = 250 millisekuntia
- = 500 millisekuntia
- = 1 sekunti
- = 2 sekuntia
- = 4 sekuntia
- = 8 sekuntia
Ennen vahtikoiran käyttöä on tärkeää varmistaa, että käynnistyksenlataaja Mitä levyn mikrokontrollerissa on? Työläs joka on käytössä, on tarjonnut tämän resurssin käyttöön. Koneen levyissä on tunnettu virhe Arduino Mega 2560 jotka jäivät roikkumaan juuri vahtikoiraa käyttävien ohjelmien kanssa.
Saat lisätietoja siitä, mitä a bootloader käynnistyslatain ja miten voit äänittää eri kuin lautasesi mukana tulleen, voit katsoa artikkeli Atmelin mikro-ohjainten ohjelmointimenetelmistä.



Post Comment