ניהול שעון כלב שמירה ב- Arduino
באלקטרוניקה ובהרחבה במחשוב, כלב השמירה הוא משאב המאפשר למכשיר פיזי או לאפליקציה להפעיל מחדש כאשר הוא מפסיק לעבוד כרגיל. באופן ספציפי, בהתייחס למיקרו-בקרים, זהו שעון ספירה לאחור שמייצר איפוס כאשר הוא עולה על גדותיו.
מבחינה לוגית, המכשיר לא יודע מתי הוא מפסיק לפעול כהלכה, עיקרון הפעולה הוא למנוע מהספירה לאחור להסתיים ולכן המערכת מתאפסת. לשם כך, ראשית מוגדר מרווח הזמן שבו מתרחשת ההפעלה מחדש, ושנית ערך זה מתרענן, ובכך מציין שהמכשיר פועל כהלכה ואין להפעיל אותו מחדש כרגע.
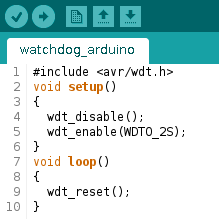
לנהל איתו את כלב השמירה Arduino יש להשתמש בספרייה ורק שלוש פונקציות: כדי להשבית אותו תוך כדי הגדרת זמן האיפוס, שמגדיר ומפעיל את כלב השמירה בזמן המצוין כפרמטר (זמן) ו שמחדש את המרווח שכלב השמירה סופר.
|
1
2
3
4
5
6
7
8
9
10
11
12
|
#include <avr/wdt.h> // Incluir la librería que contiene el watchdog (wdt.h)
void setup()
{
wdt_disable(); // Desactivar el watchdog mientras se configura
wdt_enable(WDTO_2S); // Configurar a dos segundos
}
void loop()
{
wdt_reset(); // Actualizar el watchdog para que no produzca un reinicio
}
|
קבועים שניתן להשתמש בהם כדי להגדיר את זמן הספירה לאחור הם:
- = 15 מילישניות
- = 30 מילישניות
- = 60 מילישניות
- = 120 מילישניות
- = 250 מילישניות
- = 500 מילישניות
- = שנייה אחת
- = 2 שניות
- = 4 שניות
- = 8 שניות
לפני השימוש בכלב השמירה חשוב לוודא כי טוען אתחול מה יש למיקרו-בקר על הלוח? Arduino שנמצא בשימוש סיפק לשימוש במשאב זה. קיימת שגיאה ידועה בלוחות של ארדואינו מגה 2560 שנותרו תלויים בדיוק עם תוכניות שהשתמשו בכלב השמירה.
למידע נוסף על מה א טוען אתחול או מנהל אתחול ואיך להקליט אחד שונה מזה שמגיע עם הצלחת שלך, אתה יכול להתייעץ עם מאמר על שיטות לתכנות מיקרו-בקרים של Atmel.



לפרסם תגובה