Upravljanje nadzorne ure na Arduinu
V elektroniki in širše v računalništvu je pes čuvaj vir, ki omogoča ponovni zagon fizične naprave ali aplikacije, ko preneha delovati normalno. Natančneje, če se nanašamo na mikrokontrolerje, gre za odštevalno uro, ki povzroči ponastavitev, ko se preliva.
Logično je, da naprava ne ve, kdaj preneha delovati pravilno, princip delovanja je preprečiti konec odštevanja in s tem ponastavitev sistema. Da bi to naredili, je najprej konfiguriran časovni interval, v katerem pride do ponovnega zagona, nato pa se ta vrednost osveži, kar pomeni, da naprava deluje pravilno in je trenutno ne bi smeli ponovno zagnati.
Za upravljanje psa čuvaja s Arduino knjižnico je treba uporabiti in samo tri funkcije: da ga onemogočite med konfiguriranjem časa ponastavitve, ki konfigurira in aktivira psa čuvaja ob času, ki je naveden kot parameter (čas) in ki obnavlja interval, ki ga šteje pes čuvaj.
|
1
2
3
4
5
6
7
8
9
10
11
12
|
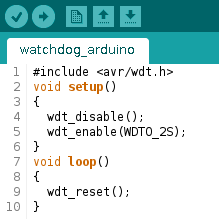
#include <avr/wdt.h> // Incluir la librería que contiene el watchdog (wdt.h)
void setup()
{
wdt_disable(); // Desactivar el watchdog mientras se configura
wdt_enable(WDTO_2S); // Configurar a dos segundos
}
void loop()
{
wdt_reset(); // Actualizar el watchdog para que no produzca un reinicio
}
|
Konstante, s katerimi se lahko uporablja za nastavitev odštevalnega časa so:
- = 15 milisekund
- = 30 milisekund
- = 60 milisekund
- = 120 milisekund
- = 250 milisekund
- = 500 milisekund
- = 1 sekunda
- = 2 sekundi
- = 4 sekundi
- = 8 sekundi
Pred uporabo nadzornega psa je pomembno zagotoviti, da zagonski nalagalnik Kaj ima mikrokontroler na plošči? Arduino ki se uporablja, je predvidel uporabo tega vira. Znana je napaka na tablicah Arduino Mega 2560 ki so ostali natanko pri programih, ki so uporabljali psa čuvaja.
Če želite izvedeti več o tem, kaj a bootloader zagonski nalagalnik in kako posneti drugačen od tistega, ki je priložen vašemu krožniku, se lahko posvetujete z članek o metodah programiranja mikrokontrolerjev Atmel.



po Komentar