Cinemática inversa de un robot de 2 grados de libertad: cómo calcular posiciones y trayectorias
La cinemática inversa es un concepto esencial en el campo de la robótica, y entender cómo calcular posiciones y trayectorias en un robot de 2 grados de libertad puede marcar la diferencia en su funcionamiento y eficiencia. En este artículo, exploraremos en detalle los fundamentos de la cinemática inversa y cómo aplicarlos en la programación de robots. Si estás interesado en descubrir cómo los robots pueden moverse de manera precisa y controlada, sigue leyendo para obtener una visión completa de este fascinante tema.
Qué modelo se debe utilizar para determinar las posiciones de un robot
Cinemática inversa de un robot de 2 grados de libertad: cómo calcular posiciones y trayectorias
La cinemática inversa es un concepto fundamental en la robótica y se utiliza para determinar las posiciones y trayectorias de un robot. En este artículo, exploraremos qué modelo se debe utilizar para llevar a cabo esta tarea en un robot de 2 grados de libertad.
Un robot de 2 grados de libertad es aquel que puede moverse en dos direcciones diferentes: rotación y traslación. Para calcular las posiciones y trayectorias de este tipo de robot, es necesario utilizar un modelo matemático que describa su cinemática inversa.
El modelo más comúnmente utilizado para la cinemática inversa de un robot de 2 grados de libertad es el modelo de la matriz de transformación homogénea. Esta matriz representa la relación entre el sistema de coordenadas del robot y el sistema de coordenadas del mundo real.
Para determinar las posiciones y trayectorias del robot, se deben seguir los siguientes pasos:
- Definir el sistema de coordenadas: Es necesario establecer un sistema de coordenadas tanto para el robot como para el entorno en el que se encuentra.
- Calcular la matriz de transformación homogénea: Utilizando las medidas y ángulos de los diferentes enlaces del robot, se puede construir la matriz de transformación homogénea.
- Resolver la cinemática inversa: Utilizando la matriz de transformación homogénea, se pueden calcular las posiciones y trayectorias del robot.
Es importante destacar que la cinemática inversa de un robot de 2 grados de libertad puede ser un proceso complejo y requiere de conocimientos avanzados en matemáticas y programación. Sin embargo, una vez que se comprende el modelo y se dominan las técnicas necesarias, es posible determinar con precisión las posiciones y trayectorias del robot.
Cómo se aplica la cinemática inversa
Cinemática inversa de un robot de 2 grados de libertad: cómo calcular posiciones y trayectorias
La cinemática inversa es una técnica utilizada en la robótica para determinar los valores de las articulaciones de un robot que permiten alcanzar una posición o trayectoria específica en el espacio. En este artículo, hablaremos específicamente sobre la cinemática inversa de un robot de 2 grados de libertad.
Un robot de 2 grados de libertad se compone de dos articulaciones que permiten el movimiento en dos ejes diferentes. Estas articulaciones se denominan «articulación 1» y «articulación 2». La cinemática inversa nos permite calcular los valores de estas articulaciones dados los valores de posición y orientación deseados para el extremo del robot.
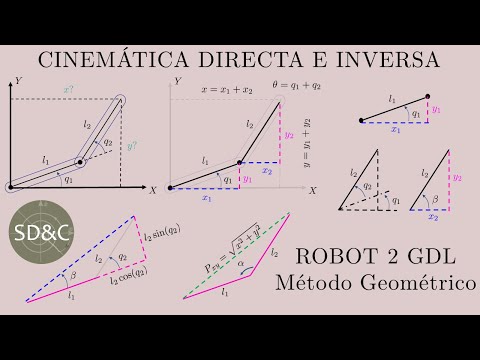
Para calcular la cinemática inversa de un robot de 2 grados de libertad, necesitamos conocer los parámetros geométricos del robot, como las longitudes de los brazos y las ubicaciones de las articulaciones. Estos parámetros se utilizan para establecer las ecuaciones que relacionan las articulaciones con la posición y orientación del extremo del robot.
Una forma común de representar la cinemática inversa de un robot de 2 grados de libertad es mediante matrices de transformación homogénea. Estas matrices nos permiten relacionar las coordenadas del extremo del robot con los valores de las articulaciones.
Para calcular las posiciones y trayectorias deseadas en un robot de 2 grados de libertad, podemos utilizar diversas técnicas, como la interpolación lineal o la interpolación de spline. Estas técnicas nos permiten determinar una secuencia de puntos que el robot debe seguir para alcanzar una trayectoria específica.
Es importante tener en cuenta que la cinemática inversa de un robot de 2 grados de libertad puede tener múltiples soluciones. Esto significa que puede haber varias combinaciones de valores de articulaciones que permitan alcanzar la misma posición y orientación del extremo del robot. En estos casos, se pueden utilizar criterios adicionales, como la eficiencia energética o la evitación de obstáculos, para determinar la mejor solución.
Cómo se calculan los grados de libertad de un robot
Cinemática inversa de un robot de 2 grados de libertad: cómo calcular posiciones y trayectorias
En el campo de la robótica, la cinemática inversa es un concepto fundamental para el control y la programación de robots. En este artículo, vamos a explicar cómo calcular posiciones y trayectorias en un robot de 2 grados de libertad, centrándonos en la cinemática inversa.
¿Qué son los grados de libertad de un robot?
Antes de adentrarnos en la cinemática inversa, es importante entender qué son los grados de libertad de un robot. Los grados de libertad se refieren al número de movimientos independientes que un robot puede realizar. En el caso de un robot de 2 grados de libertad, significa que puede moverse en dos direcciones diferentes de forma independiente.
Los grados de libertad en un robot están determinados por las articulaciones que lo componen. Cada articulación proporciona un grado de libertad adicional al sistema, permitiendo al robot moverse en una dirección específica.
¿Cómo se calculan los grados de libertad de un robot?
El cálculo de los grados de libertad de un robot depende de su estructura y diseño. Para un robot de 2 grados de libertad, generalmente se compone de dos articulaciones que pueden girar en diferentes ángulos. Estas articulaciones proporcionan los dos grados de libertad que el robot puede utilizar para moverse.
Es importante tener en cuenta que los grados de libertad no se limitan a movimientos de rotación. También pueden incluir movimientos de translación, como desplazamientos lineales en una dirección específica.
La cinemática inversa en un robot de 2 grados de libertad
La cinemática inversa es el proceso de determinar los ángulos de las articulaciones necesarios para alcanzar una posición o trayectoria objetivo en un robot. En el caso de un robot de 2 grados de libertad, la cinemática inversa implica calcular los ángulos de las dos articulaciones para lograr una posición o trayectoria deseada.
Existen diversas fórmulas y algoritmos para calcular la cinemática inversa en un robot de 2 grados de libertad. Estos cálculos suelen basarse en ecuaciones matemáticas y modelos geométricos del robot.
Aplicaciones de la cinem
¡Así que ahí lo tienes, compañero! Ahora eres todo un experto en la cinemática inversa de un robot de 2 grados de libertad. Ya puedes impresionar a tus amigos con tus conocimientos sobre cómo calcular posiciones y trayectorias. ¡Ponte en marcha y domina el arte de hacer que los robots se muevan como nunca antes! ¡Que la fuerza de los cálculos esté contigo!









Post Comment