Todo lo que necesitas saber sobre los servomotores Arduino
Descubre en este artículo todo lo que necesitas saber sobre los servomotores Arduino: desde su funcionamiento básico hasta cómo integrarlos en tus proyectos DIY. ¡Sumérgete en el fascinante mundo de la robótica y la automatización con Polaridades!
Funcionamiento del servomotor en Arduino: Todo lo que necesitas saber
**Funcionamiento del servomotor en Arduino: Todo lo que necesitas saber**
Un servomotor es un dispositivo que puede girar a un ángulo específico en respuesta a una señal de control. En el caso de Arduino, los servomotores se controlan mediante pulsos PWM (modulación de ancho de pulso), lo que permite posicionarlos con precisión.
Algunos aspectos clave a tener en cuenta sobre el funcionamiento de un servomotor en Arduino son:
– **Señal PWM**: Arduino envía una señal PWM al servomotor para indicarle la posición deseada. La duración del pulso determina el ángulo de giro del servomotor.
– **Alimentación**: Es importante alimentar el servomotor con una fuente de energía externa para evitar sobrecargar la placa Arduino.
– **Biblioteca Servo**: En Arduino, se utiliza la biblioteca Servo para controlar los servomotores de forma sencilla. Esta biblioteca facilita la generación de señales PWM para el control preciso de los servomotores.
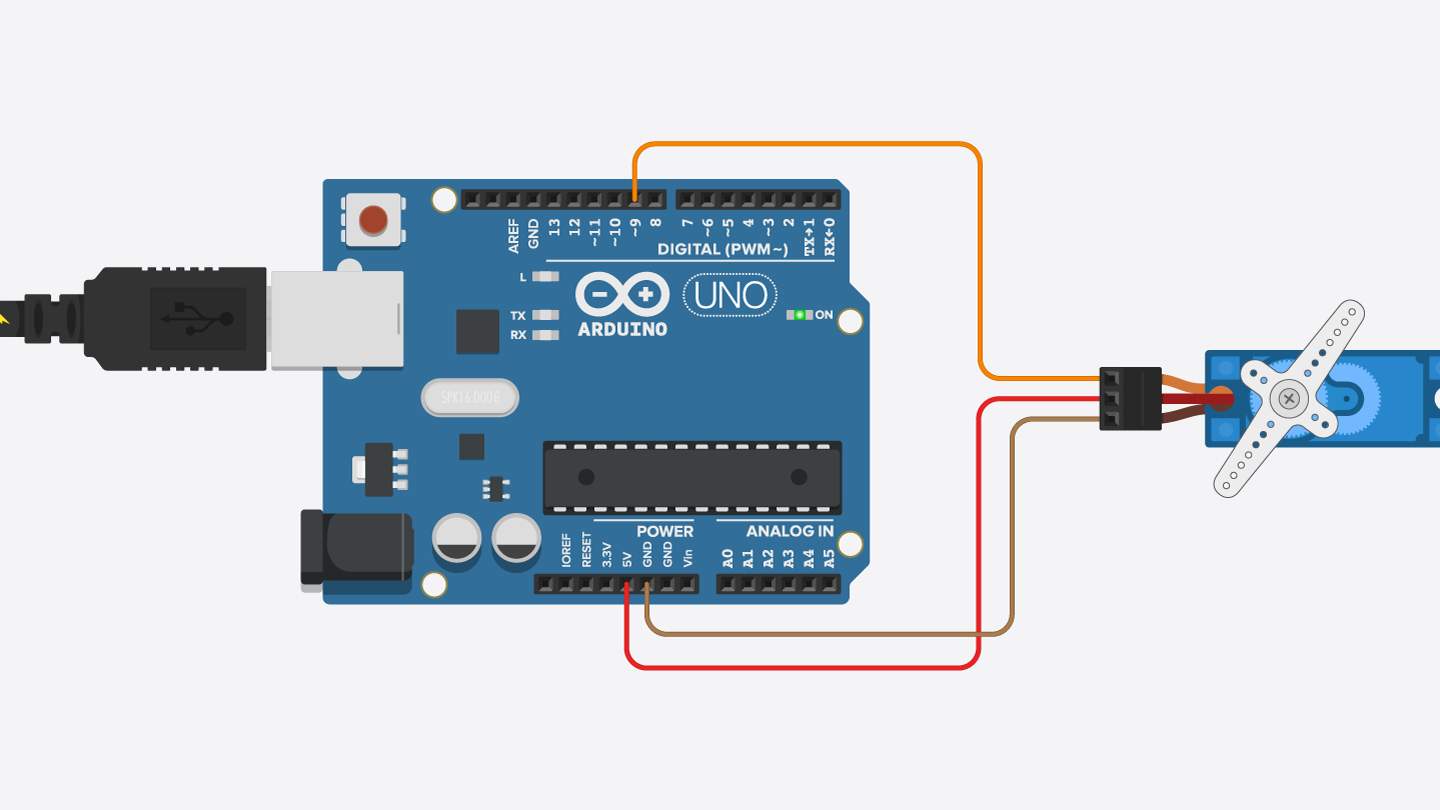
– **Conexiones**: Los servomotores suelen tener tres cables: uno para la alimentación (rojo), otro para la tierra (negro) y uno para la señal de control (amarillo o blanco). Es fundamental conectar correctamente estos cables a la placa Arduino.











Post Comment